


















Free Shipping

Daily Promotions

Free returns

Secure payments

Gifts for members
Our recommendation
IoT Products
Industrial Grade Products
Our recommendation
Edu Robot
Learn how to code with batbot
Top rated products
-
Ethernet Shield V2.0
RM30.00The Ethernet Shield V2.0 is finally released and supports both Mega 1280 and 2560. Besides, it also supports micro SD card read/write. The ethernet shield is fully functional now. The V2 Ethernet Shield is fully compatible with Ardunio Ethernet Shield. With the offical ethernet library, you can do exactly the same thing as the original one. But at a more affordable price.
-
Infrared Distance Sensor
RM20.00Specifications: Brand: Sharp, Japan 4.5V to 5.5V operating voltage. Working distance from 20cm to 150cm. Analog output Output voltage change over distance (2.8V – 0.4V) […]
-
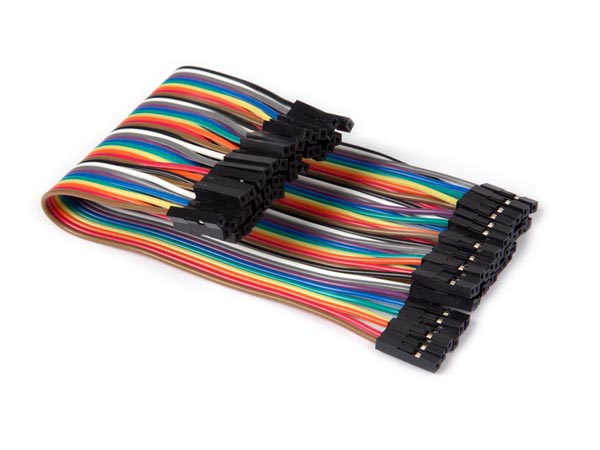
40P Dupont Female to Female Jumper Wires 20cm
RM4.00hese are very handy 40-way 20 cm length of rainbow jumper wires. You will need it for making wire harnesses or jumpering between headers on PCBs. […]


Our newest products
-
ZFT8060 Drone Fan Propeller
RM3.50Prop Disk Diameter:75mm/3” Center Thickness:5mm Center Hole Dia:1mm
-
YF-S401 Water Flow sensor Switch Meter flowmeter Coffee Dispenser Counter Fluid Control 0.3-6L/min
RM20.00Brand Generic Model STSx0042 Microless SKU 74308 Date first available 02 March, 2021 Shipping Weight 0.16 Kg Shipping Dimensions 8.00 cm x 11.00 cm x […]
-
YF-S201 Water Flow sensor flowmeter Hall flow sensor Water control 1-30L/min 2.0MPa
RM23.00DescriptionPackage : TQFPis_customized : YesModel Number : MWOperating Temperature : 0-85Dissipation Power : 1wSupply Voltage : 3-5vApplication : ComputerCondition : NewType : Voltage RegulatorBrand Name : […]
-
Water Level / Depth Sensor for Arduino
RM4.00Operating voltage: 3-5VDC Output: Analog value Operating current:
-
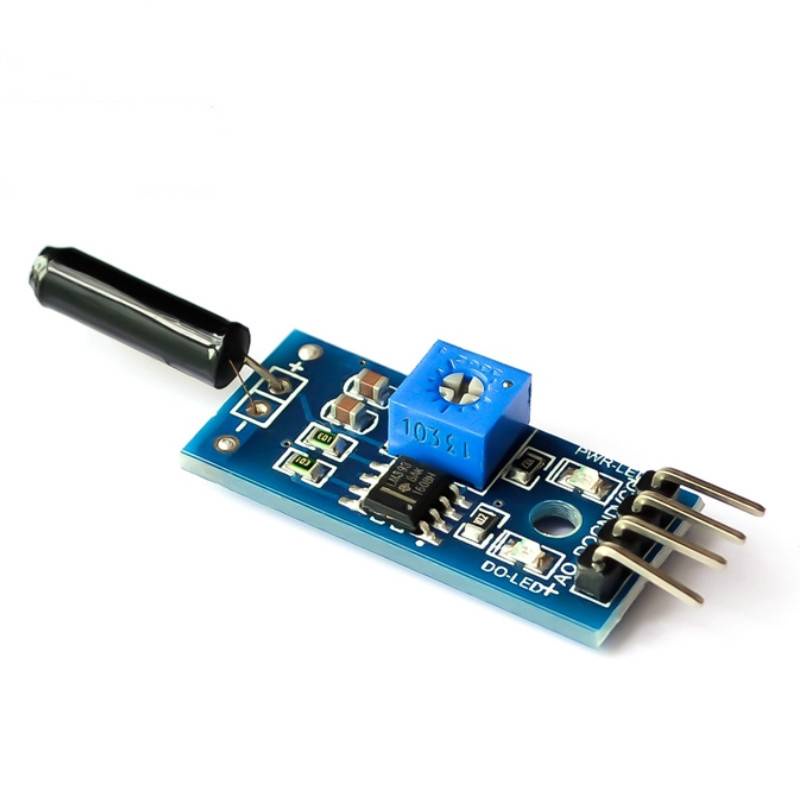
vibration tilt sensor
RM4.00Operational voltage: 3.5 VDC to 5 VDC. Nominal current: 15 mA. Output: Analog / digital. Voltage comparator: chip LM 393. LED indicator is activated with vibration. […]
-
vibration sensor
RM4.50Simple to use vibration sensor module. Comes with SW-420 vibration sensor, integrated with adjustable sensitivity via on board potentiometer. And there are LED indicators for power […]
-
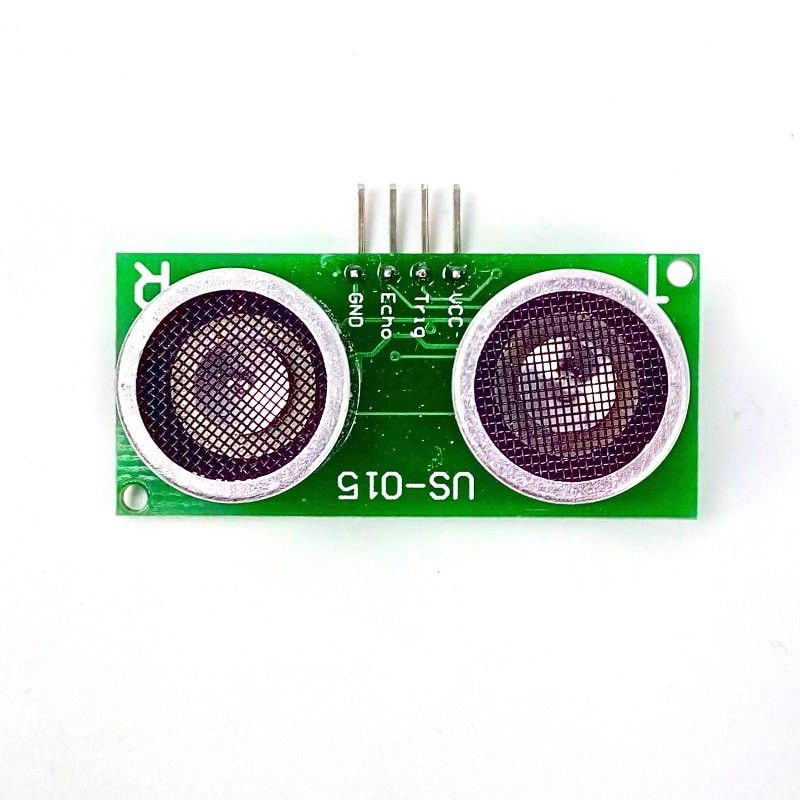
US-015 High Accuracy Ultrasonic Sensor For Arduino
RM9.00This US-015 ultrasonic sensor is your perfect sensor for distance measurement and object detection. It offers excellent range accuracy up to (1mm) and fairly stable readings […]
-
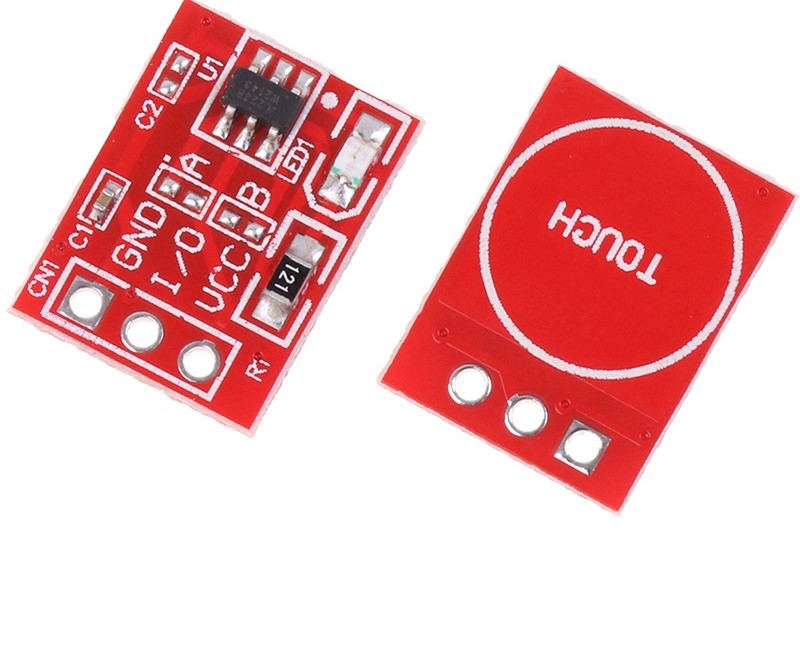
TTP223 Capacitive Touch Switch/sensor module
RM3.00Model Number: TTP223 Touch Button Switch Capacitive Sensor Module Material: Metal Module size: 15mmX12MM Color: red Power supply: 2.5v-5.5v Trigger setg mode: (1- > Short ; […]





Maker's
Selection
-
Arduino Uno Compatible (CH340) with USB Cable
RM36.00Arduino is an open-source physical computing platform based on a simple i/o board and a development environment that implements the Processing/Wiring language. Arduino can be used to develop stand-alone interactive objects or can be connected to software on your computer (e.g. Flash, Processing, MaxMSP). The open-source IDE can be downloaded for free (currently support Mac OS X, Windows, and Linux).
-
Arduino Mega 2560
RM54.90Arduino is an open-source physical computing platform based on a simple i/o board and a development environment that implements the Processing/Wiring language. Arduino can be used to develop stand-alone interactive objects or can be connected to software on your computer (e.g. Flash, Processing, MaxMSP). The open-source IDE can be downloaded for free (currently support Mac OS X, Windows, and Linux).


Thinking about inventing something?
Start with MakeSense.

Easy-to-use
MakeSense is a controller based on the ESP32 designed for rapid prototyping in various projects.
Show me products
Multiple Connectivity
Makesense offers versatile connectivity options to accommodate the needs of your projects.
Show me productsMaximize efficiency and save valuable time
with these three steps at our store.

Browse products

Making Payments






